




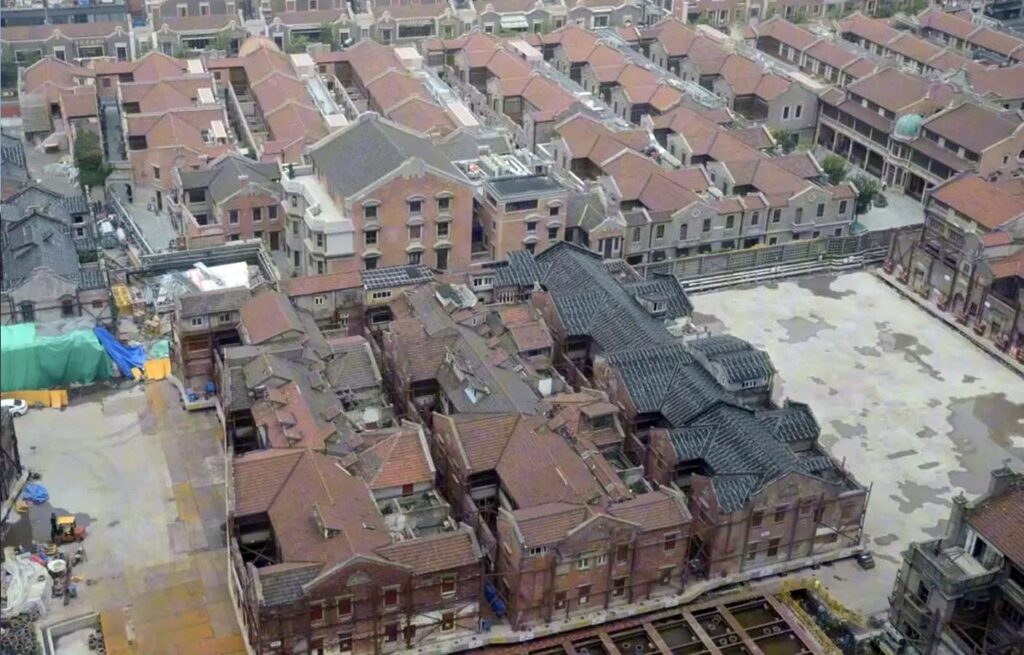
جرى مؤخرا استخدام “جيش صغير” من الروبوتات وكانت عبارة عما يشبه الأقدام الروبوتية لنقل حي من مباني شيكومين التاريخية، الذي يزن 7500 طن، في منطقة تشانغيوان بشانغهاي. واستخدمت التكنولوجيا الروبوتية في الحفاظ على التراث، وبدلاً من تفكيك أو هدم المبنى التاريخي المذكور، استخدم المهندسون روبوتات متطورة لنقل الهيكل بأكمله وذلك للمحافظة على السلامة المعمارية والقيمة التاريخية لمباني شيكومين. يُمثل نقل هيكل يزن 7500 طن تحديًا هندسيًا هائلاً، فأي حركة غير محسوبة ستكون كفيل بإلحاق ضرر بالمبنى ولذلك عملت الأقدام الروبوتية بتناسق تام، حيث رفعت المبنى وحركته ببطء وثبات، مُظهرةً دقة وتحكمًا فائقين. وجرى نقل المباني بمعدل حوالي 10 أمتار (33 قدمًا) فقط يوميًا. كانت هذه الوتيرة البطيئة ضرورية لضمان سلامة الهيكل ومنع أي ضرر أثناء النقل بهدف تنفيذ مشاريع التطوير الحضري مع الحفاظ على التراث. وجاءت عملية النقل لإفساح المجال لبناء مجمع تحت الأرض، في مشروع يُظهر كيف يُمكن للتطوير الحضري الحديث أن يتعايش مع الحفاظ على التراث الثقافي.
وتجسد الابتكار في الهندسة في العملية إذ يُعد استخدام الروبوتات في هذه المهمة الدقيقة وواسعة النطاق إنجازًا تقنيًا هامًا.
جمع المشروع بين استخدام الروبوتات المتطورة ومهمة الحفاظ على التراث، مما سمح بنقل مبنى تاريخي ضخم سليمًا بدلًا من تدميره أو إعادة بنائه. يضع هذا النهج معيارًا جديدًا لكيفية موازنة المدن بين التقدم والحفاظ على التراث.



كيف وُضعت أقدام الروبوتات أسفل المبنى التاريخ وتم رُبطها لتعمل معًا؟
تم تدعيم مباني شيكومين التاريخية بعناية لضمان سلامتها الهيكلية أثناء عملية الرفع والنقل، واستخدم المهندسون تقنيات المسح المتقدمة، والمسح ثلاثي الأبعاد، ونمذجة السحابة النقطية لرسم خريطة للمبنى وأساساته. سمح لهم ذلك بتحديد مواقع الدعم بدقة وتخطيط وضع الروبوتات. وقامت روبوتات حفر مصغرة، قادرة على اجتياز الممرات والأبواب الضيقة، بحفر الأكوام وتدعيم المبنى من الأسفل دون التسبب في اهتزازات أو أضرار. ثم وُضعت الروبوتات – وهي منصات معيارية مزودة برافعات هيدروليكية – مباشرةً أسفل الأعمدة الرئيسية الداعمة للمبنى ونقاط دعم الأحمال. ويمكن لكل قدم روبوتية تعديل ارتفاعها، مما يسمح لها برفع الهيكل تدريجيًا وبشكل متساوٍ
صُممت الروبوتات للحركة بزاوية 360 درجة، بما في ذلك التحولات الجانبية والقطرية، للتكيف مع التضاريس الضيقة وغير المستوية للمنطقة التاريخية.
نظام التحكم المركزي
تم توصيل جميع الأقدام الروبوتية، البالغ عددها 432، بنظام مراقبة وتحكم مركزي آني. ضبط هذا النظام حركتها لتعمل بتزامن دقيق ، مما يضمن رفع كل روبوت وتحركه بتناغم تام مع الآخرين. وزُوّد كل روبوت بمستشعرات لمراقبة الضغط والتفاوت والاهتزازات. وُضعت بيانات هذه المستشعرات في نظام التحكم، الذي استخدم الذكاء الاصطناعي لإجراء تعديلات آنية والحفاظ على التوازن.
عملت الروبوتات بتناغم من خلال رفع المبنى تدريجيًا بضعة سنتيمترات في كل مرة، ثم الزحف للأمام في حركة “مشي” منسقة. قلّلت هذه العملية البطيئة والمتدرجة من الضغط على الهيكل وسمحت بالتحكم الدقيق.
التقنيات الرئيسية
تولت الرافعات الهيدروليكية رفع المبنى تدريجيًا وبشكل متساوٍ فيما قامت المنصات المعيارية بوضع الروبوتات في نقاط دعم حيوية، وتولى الذكاء الاصطناعي والمستشعرات تمكين عمليات المراقبة الآنية وضبط التوازن تلقائيًا، وأتاح التحكم المركزي بتحقيق تزامن بين عمل جميع الروبوتات لضمان حركة موحدة. ووُضِعَت أقدام الروبوتات بشكل استراتيجي أسفل أقسام المبنى المُدعَّمة، مباشرةً أسفل الدعامات الهيكلية الرئيسية. ورُبِطَت عبر نظام تحكم مركزي، يستخدم الذكاء الاصطناعي وبيانات المستشعرات لتنسيق حركتها. وقد سمح هذا برفع و”سير” كامل المجمع، الذي يبلغ وزنه 7500 طن، في انسجام تام، مما ساهم في الحفاظ على سلامة المبنى طوال عملية النقل.
- تابعونا:












